The Goal
To create a robot that can be controlled by user gestures recognized using the gyroscope on an android device. The primary use case of this robot is at places that are hard to reach for humans and difficult to navigate by autonomous robots.

Figure 1: Block Diagram of the G-Bot.
Project Description
G-Bot is a robot that caan be controlled by the user by gesturing the intended movements on an android device. The android studio application uses the gyroscope on the android device to recognise the intended user gesture. This recognised gesture is then classified into 1 of the 22 identified gesture combinations and translated to the correct format. This identified gesture information is then sent to the ESP-32 using Web Sockets over WiFi and the corresponding motion for the identified gesture is performed by the robot. The Ultrasound sensor on the robot is used for object detection and returns the distance to the nearest object in front of the robot. If the distance to the nearest object from the robot is less than the set threshold then the forward motions are prohibited and only the motions involving reverse are allowed to avoid collision. This was a team project involving a team of two engineers. My focus involved development of the android application and the data transfer between the android device and the ESP-32.

Figure 2: Schematic Diagram of the G-Bot.
Components Used
- ESP32
- AMS1117 Buck Convertor
- L298N Motor Driver
- Robot chassis
- Ultrasound Sensor
- Motors
- Android Device
Video 1: G-Bot operation.

Figure 3: High Level Depiction of G-Bot.
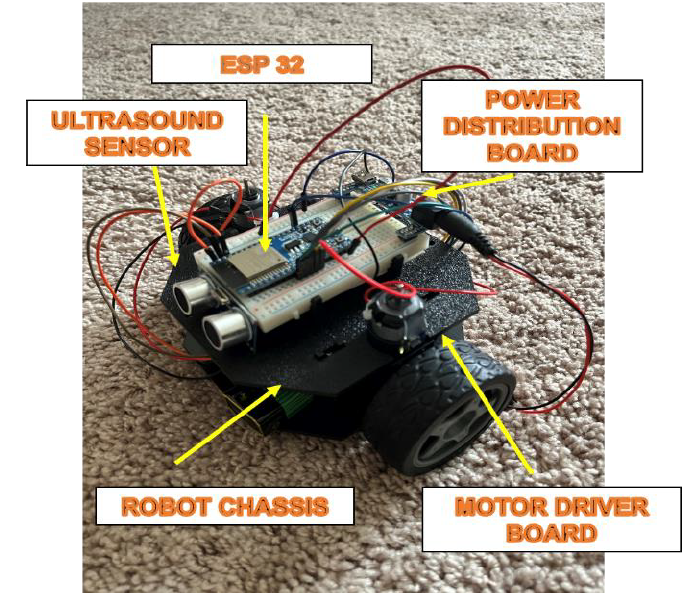
Figure 4: The G-Bot Hardware.